
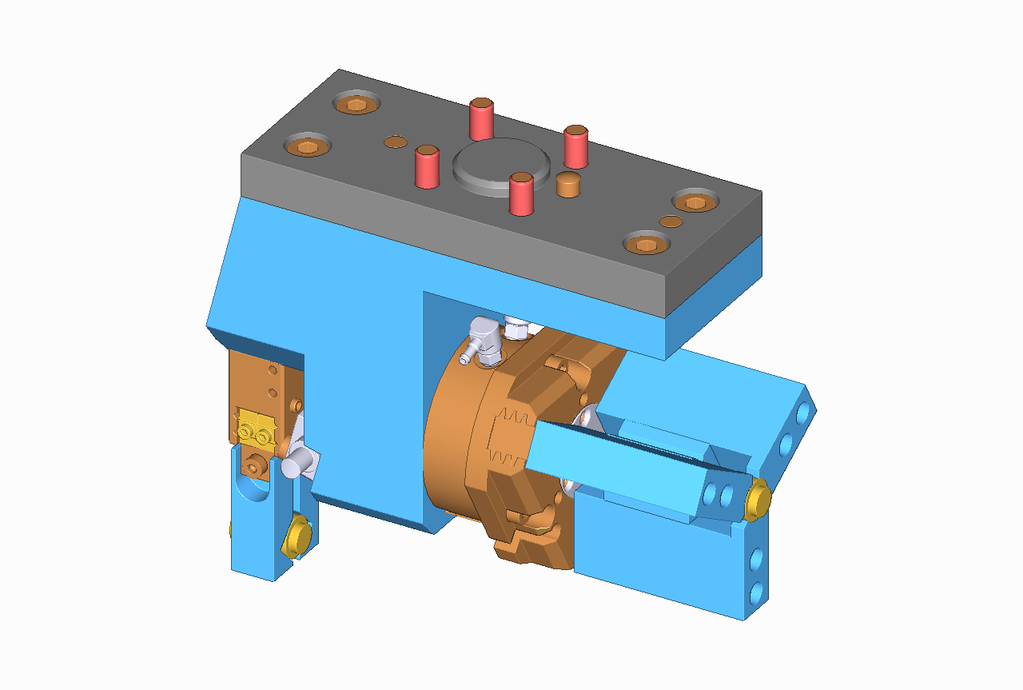
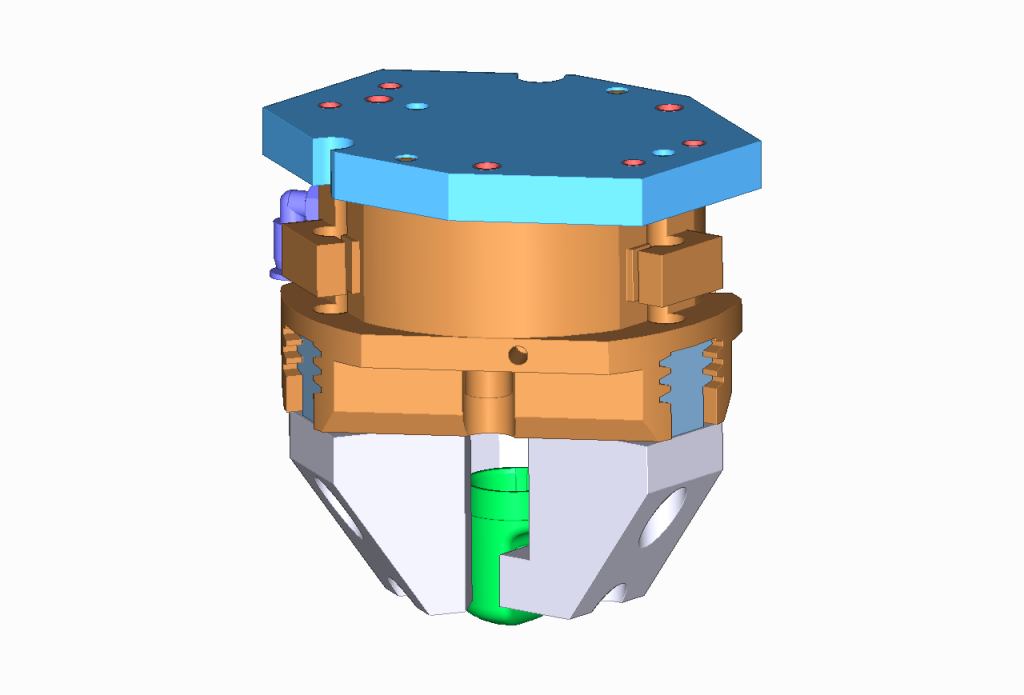
Metallringe sollen mit Kunststoff umspritzt werden. Ein Industrieroboter setzt sie mit diesem Greifer in die Spritzgussform ein.
Konstruktion und Betriebsmittel Ohnemus
Berechnungen – Konstruktionsdienstleistung – Betriebsmittel und Sondermaschinen
Metallringe sollen mit Kunststoff umspritzt werden. Ein Industrieroboter setzt sie mit diesem Greifer in die Spritzgussform ein.
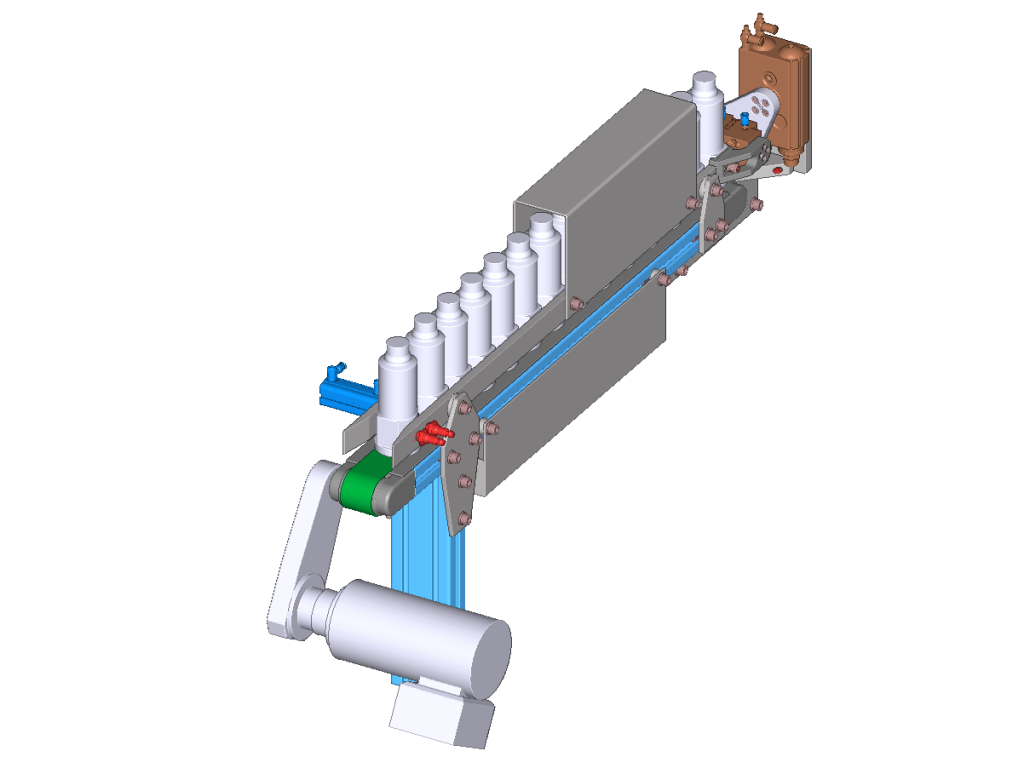 Unregelmäßig geformte Schmiederohlinge sollen automatisch einer Mehrspindeldrehmaschine
Unregelmäßig geformte Schmiederohlinge sollen automatisch einer Mehrspindeldrehmaschine
zugeführt werden.
Durch das Band entsteht ein Puffer von 15 Teilen. Der Bediener muss also nicht alle 30 Sekunden ein Teil in die Drehmaschine einlegen, sondern kann in kurzer Zeit 15 Teile auf das Band aufsetzten. Die Drehmaschine läuft dann Dank der Zuführung 6 Minuten selbstständig; der Bediener kann in dieser Zeit andere Maschinen bestücken.
Hülsen sollen einer R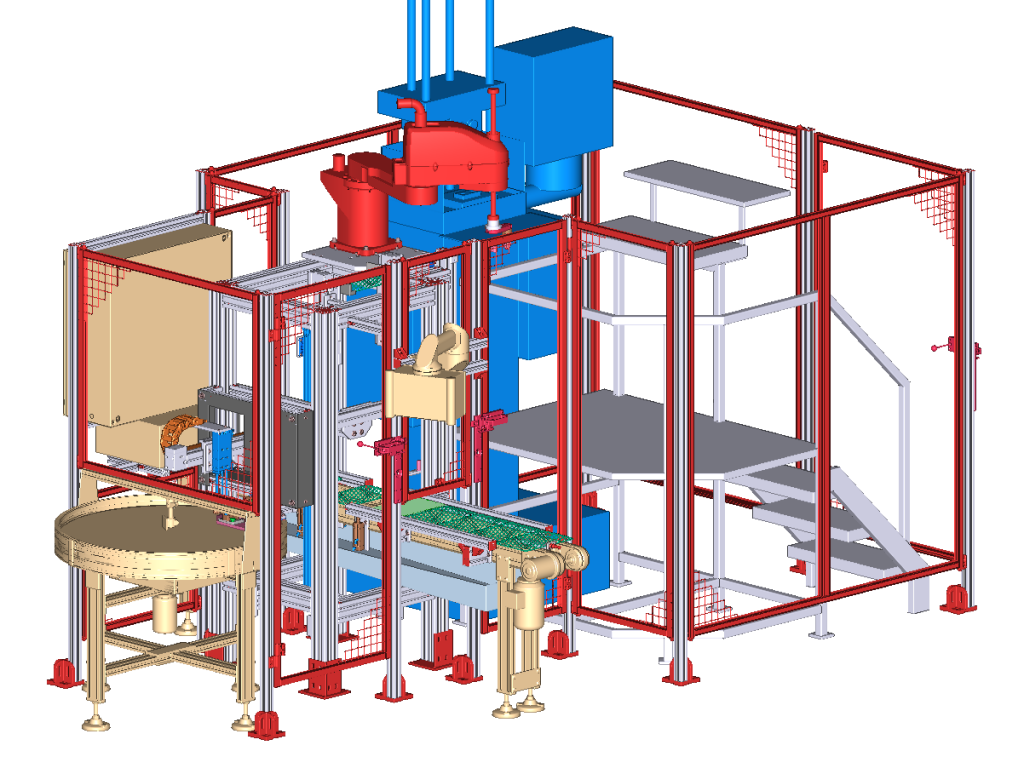 äummaschine zugeführt und nach der Bearbeitung auf Paletten abgesetzt werden.
äummaschine zugeführt und nach der Bearbeitung auf Paletten abgesetzt werden.
G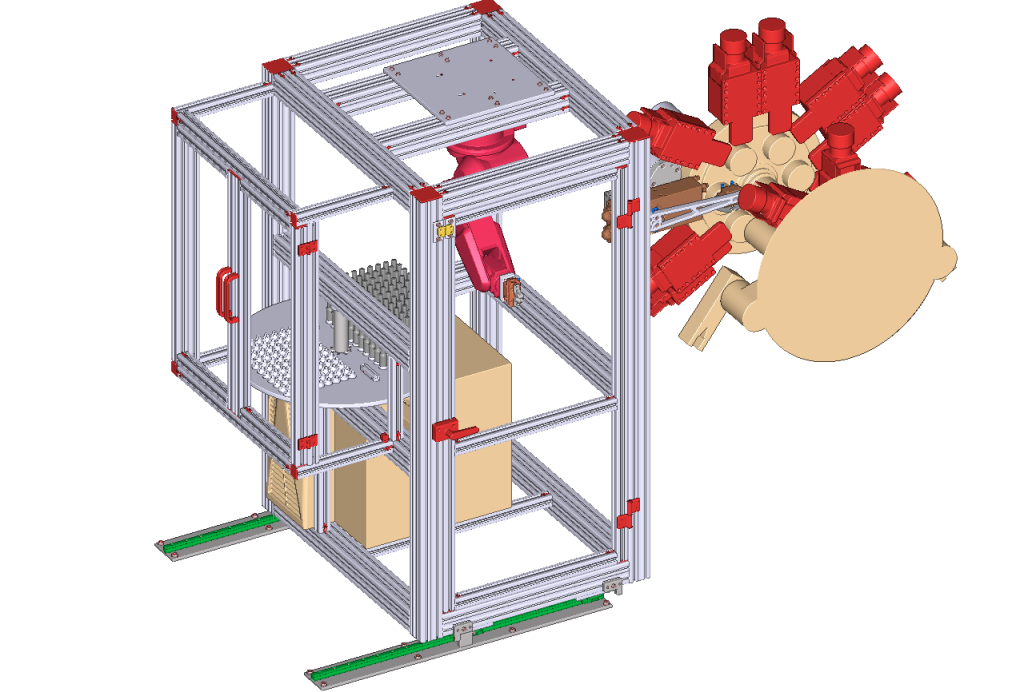 eschmiedete Rohlinge sollen automatisch einer Mehrspindeldrehmaschine zugeführt werden.
eschmiedete Rohlinge sollen automatisch einer Mehrspindeldrehmaschine zugeführt werden.
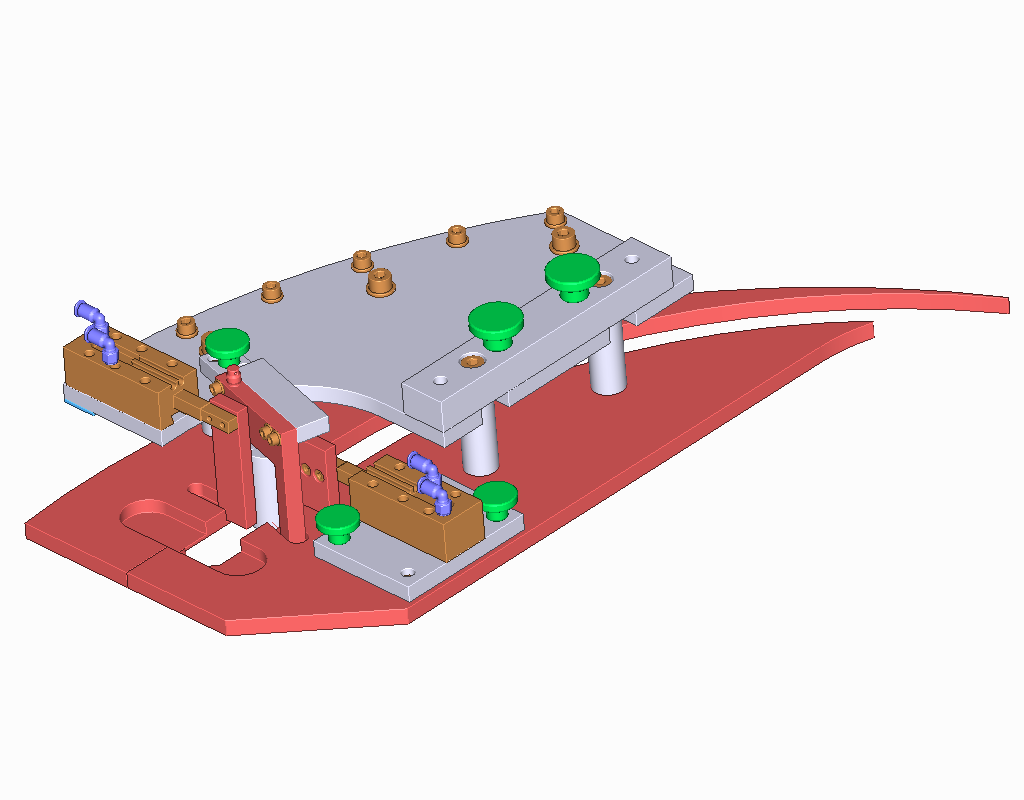
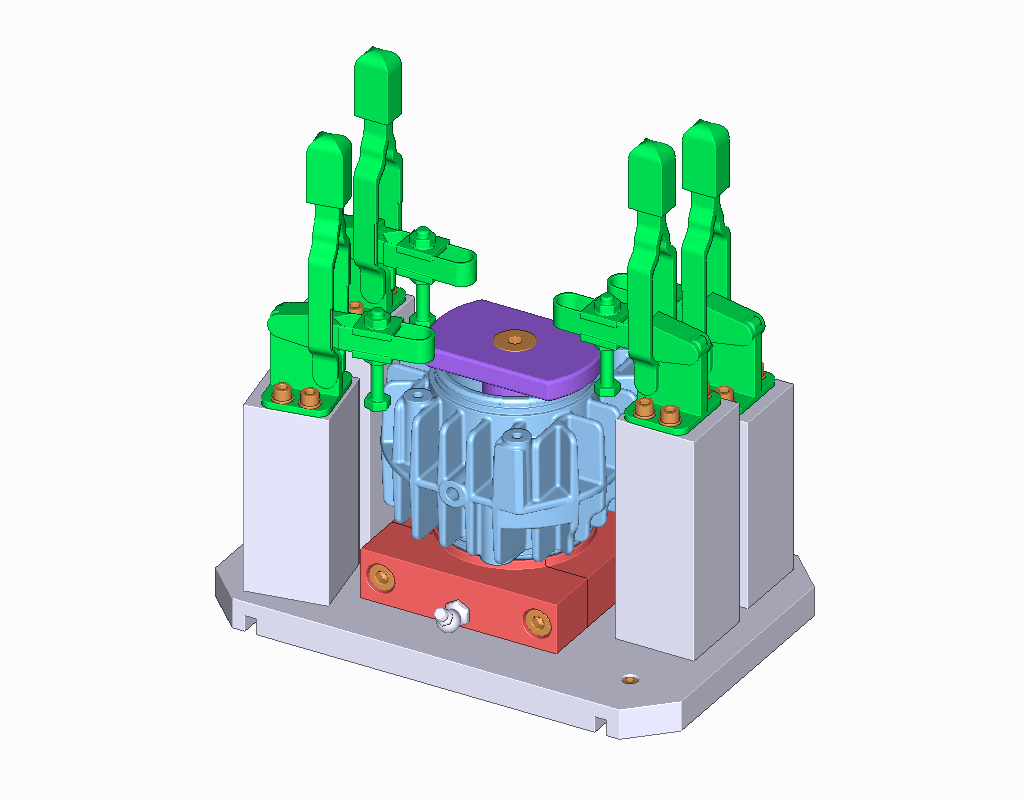 Statoren von Elektromotoren sollen mit einem Kunststoff vergossen und in einem Durchlaufofen ausgehärtet werden. Zum Halten und Transportieren dient dieser Werkstückträger.
Statoren von Elektromotoren sollen mit einem Kunststoff vergossen und in einem Durchlaufofen ausgehärtet werden. Zum Halten und Transportieren dient dieser Werkstückträger.
Insgesamt haben wir 47 Stück der Werkstückträger angefertigt.


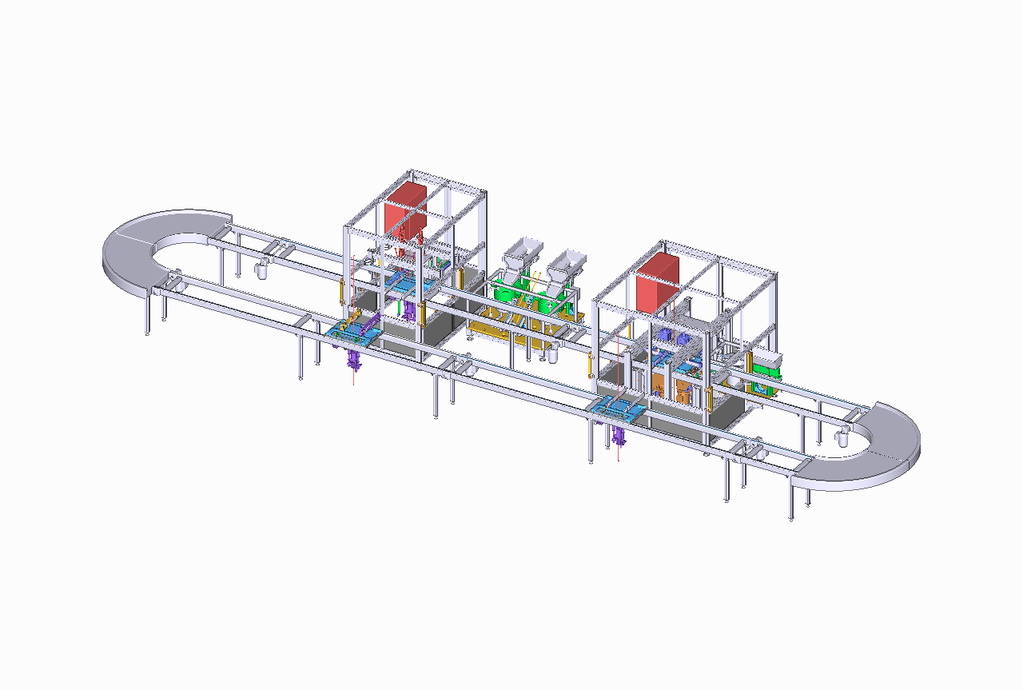 Die folgenden beiden Stationen sind Teil einer vollautomatischen Lösung zur Montage von Blechteilen. Sie sind untereinander mit einem Transfersystem verbunden, das die Blechteile auf Werkstückträgern zwischen den beiden Stationen und den Handarbeitspätzen für Bestücken und Verpacken transportiert.
Die folgenden beiden Stationen sind Teil einer vollautomatischen Lösung zur Montage von Blechteilen. Sie sind untereinander mit einem Transfersystem verbunden, das die Blechteile auf Werkstückträgern zwischen den beiden Stationen und den Handarbeitspätzen für Bestücken und Verpacken transportiert.
Die einzelnen Stationen einer vollautomatischen Lösung zur Montage von Blechteilen sind untereinander mit einem Transfersystem verbunden, das die Blechteile auf Werkstückträgern zwischen den beiden Stationen und den Handarbeitspätzen für Bestücken und Verpacken transportiert.
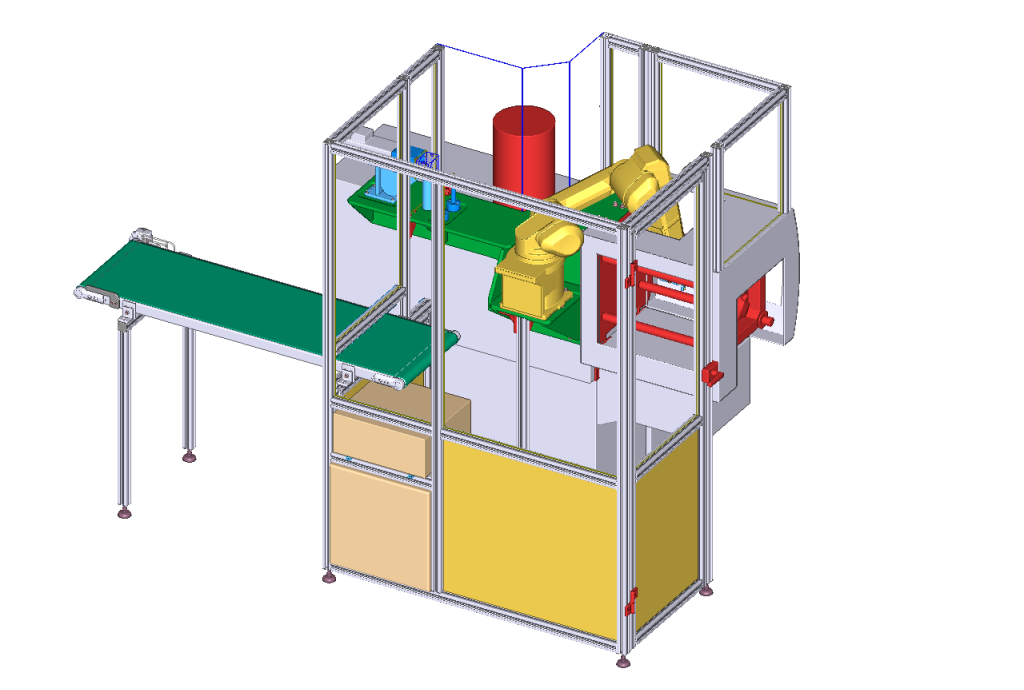 Empfindliche Spritzgussteile dürfen beim Öffnen der Spritzgussform nicht einfach ausgestoßen und fallen gelassen werden, da sie sonst beschädigt werden würden. Sie müssen definiert aus der Form entnommen werden.
Empfindliche Spritzgussteile dürfen beim Öffnen der Spritzgussform nicht einfach ausgestoßen und fallen gelassen werden, da sie sonst beschädigt werden würden. Sie müssen definiert aus der Form entnommen werden.
Um dies zu automatisieren kommt ein Sechsachsroboter mit Doppelgreifer zum Einsatz.
Verpa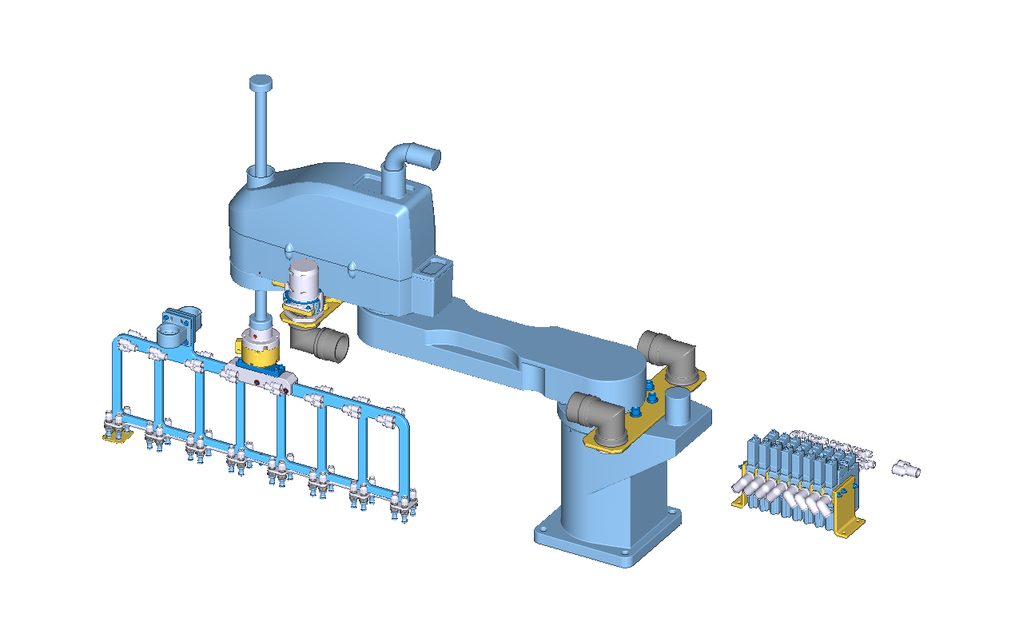 ckungen müssen in der Produktion umgesetzt werden. Je nach Produktgröße kann der Roboter bis zu 8 Päckchen transportieren.
ckungen müssen in der Produktion umgesetzt werden. Je nach Produktgröße kann der Roboter bis zu 8 Päckchen transportieren.
Bei der Herstellung von  Waschtischen müssen die mit Waschtisch 100kg schweren Formen aus der Waschtischpresse entnommen und kopfüber auf dem Entformtisch abgelegt werden.
Waschtischen müssen die mit Waschtisch 100kg schweren Formen aus der Waschtischpresse entnommen und kopfüber auf dem Entformtisch abgelegt werden.